Research
Research Areas
Math-CVML is a research group within the Centre for Mathematical Sciences. The research within the group can roughly be divided into localization and mapping, medical image analysis, machine learning and optimization. Here follows a description of research themes we pursue within the group.
Localization and Mapping

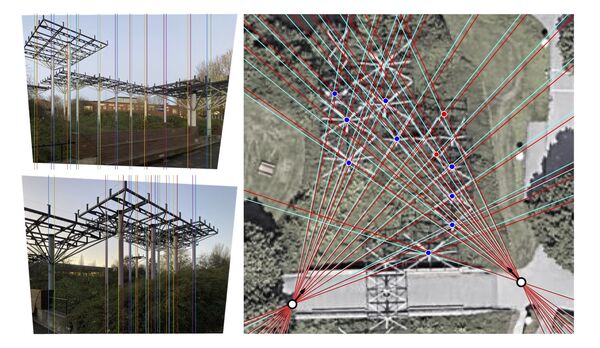
Mapping, positioning and localization are key enabling technologies for a wide range of applications e.g. robotics, augmented and mixed reality, navigation and autonomous agents. The core problems are mapping, i.e. building representations of the world, and localization, i.e. estimating the position of a device given new sensor input. Our group has a long history in geometric computer vision and 3D reconstruction, with a heavy focus on multi-view geometry, robust estimation and optimization. Currently, our research within this field is mainly based on combining such geometry-based methods with modern deep learning approaches. While we are mostly focused on solving these problems with cameras, we also consider other sensor modalities such as sound, radio, IMU and radar. Current research topics include Structure-from-Motion, SLAM, T(D)OA, visual localization, sensor-node calibration/localization and 3D reconstruction.
KalleAstrom by kalleastrom on Sketchfab
Medical Image Analysis
This field combines medical imaging technology, computer science, and data analysis methods to aid in the diagnosis, treatment, and research of various medical conditions. There is a pressing demand of new techniques and applications within medical imaging due to lack of pathologists, radiologists and other medical professionals. The current situation of the field is development of assisting AI, either suggesting diagnosis directly or presentation of areas of interest or estimations of parameters that is of importance for the doctor to assess a diagnosis. AI also has the possibility to detect diseases in an early stage which for a human might be difficult to find. The close future of AI in medicine is for it to take full responsibility.
Common choice of methods for solving problems within medical image analysis are different types of machine learning. We mainly develop methods and algorithms based on deep learning with the goal of classification, segmentation, anomaly detection or longitudinal predictions. Working with medical data often implies limitations in data due to the need of an expert to annotate the data, variations between hospitals and also that the data typically is sensitive and thus harder to share.
Our research is currently focued on applications in prostate, breast and skin cancer, Alzheimer’s dementia, and cardiovascular diseases. We are working with a variety of image modalities such as ultrasound images, microscopy images, MRI and CT, cooperating with a number of hospitals and medical companies.
Machine Learning
This field refers to the research of machine learning methods, unlike our other areas, where we apply machine learning to solve specific problems. Machine learning involves training algorithms to improve task performance through the analysis of experiences, enabling systems to learn and adapt from data.
We devise algorithms and methodologies to address tasks by leveraging experiential insights, aiming to optimize specific performance metrics. Within this field we are employing and aiming to advance machine learning techniques across diverse applications spanning supervised and unsupervised learning paradigms, frequently applied in domains such as medicine, 3D reconstruction, satellite imagery, and various modalities. More specifc, we are currently working on solutions in sound propagation modelling, autonomous navigation on roads and in forests, forecasting agricultural yield and understanding noise.
Optimization
Optimization is development of the best strategy or design that fulfills a set of given criteria. Traditionally, the goal is to adjust the parameters of a mathematical model such that it agrees with real observations in the optimal way.
Inverse problems in computer vision is an example. A more concrete example is the structure-from-motion problem where you aim to determine camera positions from keypoints of images, which naturally leads to global optimization problems. This is the historical origin of our research within this field.
Currently our research is mainly focused on compressed sensing, e.g. sparse or low-rank solutions. We are working with both practical development of effective solving algorithms and with theoretical results that provide certificates of optimality.
Polynomial Equations in Vision
A central part of many geometric computer vision systems is an algorithm which solves for geometry and calibration from a small number of point correspondences between images. A fast and efficient way of doing this is to formulate the problem as a system of polynomial equations and then numerically extracting the zeros. For linear systems one can do this effortlessly in large scale. However, for polynomial equations, the picture is much more complicated and there are no known, well functioning, general purpose methods. We try to combine algebraic geometry with efficient computational techniques to come up with new efficient methods for numerical treatment of polnomial equations. -> Polynomial equations arise in many geometric computer vision problems. Contrary to the situation with linear systems, where one can solve large systems extremely efficiently, the picture is here much more complicated. We try to combine algebraic geometry with efficient computational techniques to come up with new numerical methods for polynomial equations.
Vision in Robotics
To give an industrial robot of today a new task, quite a lot of programming work is required as it is done on a very low level. This research tries to lift the programming to a higher level at which different kinds of sensors are used. That information can then be used as primitives in the programming and to build safe robots that can work together with humans without putting the human at risk of being hurt.
Biological Vision
In this multidisciplinary theme we work together with researchers in biology. We investigate how visual systems are built and evolve, and how this knowledge of biological systems can be extended to machine vision. For instance primitive visual systems in lower animals typically serve only one or a few visual tasks, and their simple and machine-like features are excellent sources for bio-inspired new technologies in machine vision and robotics.
Smart Cities and Traffic Safety Analysis
By analysing the motion of road users it is possible accurately predict the number of accidents that will occur and thereby asses how safe it is. Today this process is performed manually with observers spending several days standing in the intersections. This research aims at automating the process by using video analytics and surveillance cameras.
Animal analysis
The project aims to identify biomarkers of animal health and welfare in order to increase knowledge of animal behavior and basic needs in general, and the importance of locomotion disorders in particular. With larger herds and higher production requirements less space is given for supervision of the individual animal.